[Napomene o programskom kôdu u Sage-u:
Tekst poput ovoga, pisan slovima sans serif (bez vitica), odnosi se ponajprije na programski kôd.
Ćelije u kojima je prvi redak %auto ne trebate izvoditi ( evaluate ); one se izvode „same” pri otvaranju radnoga lista.
Funkcije, programska realizacija kojih nije bitna za razumijevanje gradiva Mehanike 1., „skrivene” su, a opisan je samo način njihova pozivanja.]
|
|
Funkcije koje smo definirali u radnim listovima Mehanika_1-01_Sila i Mehanika_1-02_Moment uvedene su u i ovaj radni list.
Mehanika 1.
Statička ekvivalencija
[Natuknice možete naći i u datoteci Statička ekvivalencija u Bilješkama i skicama s predavanja iz Mehanike 1.]
Na prošlom smo predavanju uveli uvjete ravnoteže tijela na koje djeluju koncentrirane sile $\big\{\vec{F}_i\big\}_{i = 0}^{n-1}$ i koncentrirani momenti $\big\{\vec{M}_i\big\}_{j = 0}^{m-1}$:
1. iščezavanje zbroja svih sila:
vektorski oblik:
$\displaystyle\sum_{i = 0}^{n-1} \vec{F}_i \:=\: \vec{0}$
skalarni oblik:
$\displaystyle\sum_{i = 0}^{n-1} F_{i,x} \:=\: 0$
$\displaystyle\sum_{i = 0}^{n-1} F_{i,y} \:=\: 0$
$\displaystyle\sum_{i = 0}^{n-1} F_{i,z} \:=\: 0$
2. iščezavanje zbroja momenata svih sila u odnosu na bilo koju točku (odabrali smo ishodište) i svih koncentriranih momenata:
vektorski oblik:
$\displaystyle\sum_{i = 0}^{n-1} \vec{r}_{F_i/O}\times\vec{F}_i \,+\, \displaystyle\sum_{j = 0}^{m} \vec{M}_j \:=\: \vec{0}$
skalarni oblik:
$\displaystyle\sum_{i = 0}^{n-1} (y_i\,F_{i,z} - z_i\,F_{i,y}) \,+\, \displaystyle\sum_{j = 0}^{m-1} M_{j,x} \:=\: 0$
$\displaystyle\sum_{i = 0}^{n-1} (-x_i\,F_{i,z} + z_i\,F_{i,x}) \,+\, \displaystyle\sum_{j = 0}^{m-1} M_{j,y} \:=\: 0$
$\displaystyle\sum_{i = 0}^{n-1} (x_i\,F_{i,y} - y_i\,F_{i,x}) \,+\, \displaystyle\sum_{j = 0}^{m-1} M_{j,z} \:=\: 0$
Dva su sistema sila i koncentriranih momenata statički ekvivalentna ako su njihovi doprinosi uvjetima ravnoteže jednaki.
Primjer 1.:
Paralelni pomak sile ili redukcija sile na točku
Izračunat ćemo djelovanje sile $\vec{F} = -4\,\vec{\imath} + 3\,\vec{\jmath} - 2\,\vec{k}$, s hvatištem u ishodištu, na točku $A = \big(\!\frac{5}{3}, \frac{7}{3}, 2\big)$. (Točka $A$ ne leži na pravcu djelovanja sile $\vec{F}$.)
|
|
|
|
- u točki $A$ dodajemo sile $\vec{F}$ i $-\vec{F}\,$; budući da te sile djeluju na istom pravcu i da je $\vec{F} + (-\vec{F}\;) \,=\, \vec{F} - \vec{F} \,=\, \vec{0}$, može se reći da nismo dodali ništa ...
|
|
- ... ali, sila $\vec{F}$ u točki $O$ i sila $-\vec{F}$ u točki $A$ tvore spreg ...
|
|
- ... moment kojega je $\vec{M}_{\pm F} \,=\, \vec{r}_{\!O/A}\times \vec{F}$ ...
(32/3, 14/3, -43/3) (32/3, 14/3, -43/3) |
|
|
- ... sila $\vec{F}$ koja djeluje u točki $O$ (i, općenitije, na pravcu kroz točku $O$) može se, prema tome, zamijeniti silom $\vec{F}$ u točki $A$ (općenitije: na pravcu kroz $A$) i momentom sprega $\vec{M}_{\pm F}$ (koji obično crtamo u točki $A$, iako je, znamo, njegov položaj u prostoru neodređen) ...
|
|
- ... ali je, naravno, $\vec{M}_{\pm F} \,\perp\, \vec{F}$.
True True |
Rezultirajuće djelovanje sistema sila $\boldsymbol{\Big\{\vec{F}_i\Big\}_{i = 0}^{n-1}}$ i koncentriranih momenata $\boldsymbol{\Big\{\vec{M}_i\Big\}_{j = 0}^{m-1}}$ u odnosu na točku $\boldsymbol{A}$ (ili dinama u točki $A$)
Svaki se sistem sila i koncentriranih momenata može na bezbrojno mnogo načina zamijeniti statički ekvivalentnim sistemom koji sadrži jednu silu i jedan moment; u posebnim slučajevima mogu iščeznuti ili sila ili moment ili i sila i moment. Samo jedno rješenje dobiva se odabere li se točka kojom zamjenjujuća sila prolazi i u odnosu na koju se izračunavaju momenti sila zadanoga sistema.
U općem je slučaju sistem s jednom silom i jednim momentom najjednostavniji statički ekvivalentan sistem na koji se zadani sistem sila i momenata može svesti. Takav sistem nazivamo rezultirajućim djelovanjem u odnosu na odabranu točku $A$, silu koju sadrži rezultirajućom silom, a moment rezultirajućim momentom.
Rezultirajuća sila ili glavni vektor sila zbroj je svih sila zadanoga sistema:
$\vec{F}_{R/A} \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{F}_i \:=\: \vec{F}_R$;
uzima se da je njezino hvatište točka $A$.
Rezultirajući moment u odnosu na točku $A$ ili glavni vektor momenata zbroj je momenata svih sila zadanoga sistema u odnosu na tu točku i svih zadanih koncentriranih momenata:
$\vec{M}_{R/A} \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{r}_{F_i/A} \times \vec{F}_i \:+\, \displaystyle\sum_{j=0}^{m-1} \vec{M}_j$
Primjer 1.: (nastavak)
Djelovanje sile $\vec{F}$ na točku $A$ izračunat ćemo sada prema definiciji rezultirajućega djelovanja:
- rezultirajuća sila: $\vec{F}_{R/A} \,=\, \vec{F}_R \,=\, \vec{F}$
- rezultirajući moment: $\vec{M}_{R/A} \,=\, \vec{r}_{F/A}\times\vec{F}$
- rezultirajuća sila:
(-4, 3, -2) (-4, 3, -2) |
- rezultirajući moment u odnosu na točku $A$:
- položajni vektor sile $\vec{F}$ u odnosu na točku $A$:
$\vec{r}_{F/A} \,=\, \vec{r}_{O/A}$
(-5/3, -7/3, -2) (-5/3, -7/3, -2) |
- moment sile $\vec{F}$ u odnosu na točku $A$:
(32/3, 14/3, -43/3) (32/3, 14/3, -43/3) |
- rezultirajuće djelovanje u odnosu na točku $A$:
|
|
Primjer 1.: (još jedan nastavak, s važnim zaključkom)
Neka je $B$ točka na pravcu koji točkom $A$ prolazi paralelno s pravcem djelovanja sile $\vec{F}$, primjerice $B = \big(\!-1, \frac{13}{3}, \frac{2}{3}\big)$. Izračunat ćemo djelovanje sile $\vec{F}$ (s hvatištem u ishodištu) na točku $B$.
|
|
|
|
(-4, 3, -2) (-4, 3, -2) |
(1, -13/3, -2/3) (1, -13/3, -2/3) |
(32/3, 14/3, -43/3) (32/3, 14/3, -43/3) |
|
|
True True |
|
|
Zaključak: djelovanje je sile $\vec{F}$ na sve točke pravca paralelnoga s pravcem njezina djelovanja jednako.
Primjer, naravno, nije dokaz, pa slijedi i formalni dokaz:
$\vec{M}_{F/B} \:=\: \vec{r}_{F/B} \times \vec{F} \:=\: (\vec{r}_{A/B} \,+\, \vec{r}_{F/A}) \times \vec{F} \:=\: \underbrace{\vec{r}_{A/B} \times \vec{F}}_{\displaystyle = \vec{0}} \,+\, \vec{r}_{F/A} \times \vec{F} \:=\: \vec{r}_{F/A} \times \vec{F} \:=\: \vec{M}_{F/A}$
[Zašto je $\vec{r}_{A/B} \times \vec{F} \,=\, \vec{0}$?]
Primjer 2.:
Sila $\vec{F}_0 \,=\, \frac{9}{5}\,\vec{\imath}$ djeluje u točki $C_0 = \big(\frac{1}{4}, \frac{1}{4}, -\frac{5}{6}\big)$, a sila $\vec{F}_1 \,=\, \frac{13}{5}\,\vec{\jmath} + \frac{5}{7}\, \vec{k}$ u točki $C_1 = \big(\!-\!1, 0, \frac{7}{8}\big)$. (Pravci djelovanja sila $\vec{F}_0$ i $\vec{F}_1$ su mimosmjerni. Točka $A$ leži na pravcu djelovanja sile $\vec{F}_0$.) Zadan je i koncentrirani moment $\vec{M}_0 = -\frac{7}{4}\,\vec{\imath} + \frac{17}{5}\,\vec{\jmath} + \frac{3}{4}\,\vec{k}$.
Izračunat ćemo rezultirajuće djelovanje sistema $\big\{\vec{F}_0, \vec{F}_1, \vec{M}_0 \big\}$ u odnosu na točku $A = \big(\!-\!\frac{1}{2}, \frac{1}{4}, -\frac{5}{6}\big)$.
- zadane sile, moment i točka $A$:
|
|
- koncentrirani moment $\vec{M}_0$ možemo staviti u bilo koju točku — stavit ćemo ga u točku $A$:
|
|
- rezultirajuća sila u točki $A$:
$\vec{F}_{R/A} \:=\: \vec{F}_R \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{F}_i \:=\: \vec{F}_0 \,+\, \vec{F}_1$
(9/5, 13/5, 5/7) (9/5, 13/5, 5/7) |
- položajni vektori sila u odnosu na točku $A$:
$\vec{r}_{F_0/A} = \vec{r}_{C_0/A}$ i $\vec{r}_{F_1/A} = \vec{r}_{C_1/A}$
(3/4, 0, 0) (-1/2, -1/4, 41/24) (3/4, 0, 0) (-1/2, -1/4, 41/24) |
|
|
- moment sile $\vec{F}_0$ u odnosu na točku $A$:
$\vec{M}_{F_0/A} = \vec{0}$ [zašto?]
(0, 0, 0) (0, 0, 0) |
- moment sile $\vec{F}_1$ u odnosu na točku $A$:
$\vec{M}_{F_1/A} \,=\, \vec{r}_{F_1/A}\times \vec{F}_1$
(-3881/840, 5/14, -13/10) (-3881/840, 5/14, -13/10) |
- rezultirajući moment u odnosu na točku $A$:
$\vec{M}_{R/A} \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{M}_{F_i/A} \:+\, \displaystyle\sum_{j=0}^{m-1} \vec{M}_j \:=\: \vec{M}_{F_0/A} \,+\, \vec{M}_{F_1/A} \,+\, \vec{M}_0$
(-4931/840, 291/70, -1/20) (-4931/840, 291/70, -1/20) |
- rezultirajuće djelovanje u odnosu na točku $A$:
|
|
Rezultirajuću silu i rezultirajući moment možemo i „grafički” konstruirati:
- djelovanje u točki $A$ statički ekvivalentno zadanim silama — sile $\vec{F}_0$ i $\vec{F}_1$ paralelno su pomaknute u točku $A$ dodavanjem momenta $\vec{M}_{F_1/A}$:
|
|
- rezultirajuća sila u točki $A$, $\vec{F}_{R/A} \:=\: \vec{F}_0 \,+\, \vec{F}_1$, dobivena s pomoću paralelograma sila, ...
|
|
- ... i rezultirajući moment u odnosu na točku $A$, $\vec{M}_{R/A} \:=\: \vec{M}_{F_1/A} \,+\, \vec{M}_0$ ...
|
|
- ... zajedno tvore rezultirajuće djelovanje u odnosu na točku $A$:
|
|
Iako i rezultirajuću silu i rezultirajući moment prikazujemo vektorima, ta dva vektora ne možemo zbrojiti.
Rezultirajuće djelovanje u odnosu na (neku drugu) točku $\boldsymbol{B}$
Ako je poznato rezultirajuće djelovanje sistema sila i momenata u odnosu na točku $A$, onda se rezultirajuće djelovanje u odnosu na točki $B$ može izračunati prema sljedećim izrazima:
- rezultirajuća sila:
$\vec{F}_{R/B} \:=\: \vec{F}_{R/A}$,
- rezultirajući moment:
$\vec{M}_{R/B} \:=\; \vec{r}_{A/B} \times \vec{F}_R \:+\: \vec{M}_{R/A}$.
Izraz za rezultirajuću silu slijedi neposredno iz njezine definicije,
$\vec{F}_{R/B} \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{F}_i \:=\: \vec{F}_R \:=\: \vec{F}_{R/A}$,
dok je izvod izraza za rezultirajući moment nešto složeniji. Provest ćemo ga uz primjer (ali će svi izrazi u izvodu biti opći).
Primjer 2. (nastavak):
Izračunat ćemo rezultirajuće djelovanje sistema $\big\{\vec{F}_0, \vec{F}_1, \vec{M}_0\big\}$ u odnosu na točku $B = \big(\!-\!\frac{2}{5}, \frac{69}{43}, 0\big)$.
|
|
|
|
- rezultirajuća sila (u odnosu na točku $B$):
$\vec{F}_{R/B} \,=\, \vec{F}_R \,=\, \displaystyle\sum_{i=0}^{n-1} \vec{F}_i \,=\, \vec{F}_0 + \vec{F}_1$
(9/5, 13/5, 5/7) (9/5, 13/5, 5/7) |
True True |
I u izvodu izraza za rezultirajući moment u odnosu na točku $B$ polazimo od njegove definicije:
$\vec{M}_{R/B} \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{r}_{F_i/B} \times \vec{F}_i \:+\, \displaystyle\sum_{j=0}^{m-1} \vec{M}_j$.
- položajni vektori sila u odnosu na točku $B$:
(13/20, -233/172, -5/6) (-3/5, -69/43, 7/8) (13/20, -233/172, -5/6) (-3/5, -69/43, 7/8) |
|
|
Položajni vektor $\vec{r}_{F_i/B}$ sile $\vec{F}_i$ u odnosu na točku $B$ možemo izraziti kao zbroj položajnoga vektora $\vec{r}_{A/B}$ točke $A$ u odnosu na točku $B$ i položajnoga vektora $\vec{r}_{F_i/A}$ sile $\vec{F}_i$ u odnosu na točku $A$, $\vec{r}_{F_i/B} = \vec{r}_{A/B} + \vec{r}_{F_i/A}$.
- položajni vektor $\vec{r}_{A/B}$:
|
|
- $\vec{r}_{F_i/B} = \vec{r}_{A/B} + \vec{r}_{F_i/A}$:
True True |
True True |
|
|
Izraz za rezultirajući moment u odnosu na točku $B$ sada je
$\vec{M}_{R/B} \:=\: \displaystyle\sum_{i=0}^{n-1} \big(\vec{r}_{A/B} + \vec{r}_{F_i/A}\big) \times \vec{F}_i \:+\, \displaystyle\sum_{j=0}^{m-1} \vec{M}_j$.
Primjena zakona distributivnosti za vektorski produkt u prvome pribrojniku daje
$\vec{M}_{R/B} \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{r}_{A/B} \times \vec{F}_i \:+\, \displaystyle\sum_{i=0}^{n-1} \vec{r}_{F_i/A} \times \vec{F}_i \:+\, \displaystyle\sum_{j=0}^{m-1} \vec{M}_j$.
Uz još jednu je primjenu zakona distributivnosti u novodobivenu prvom pribrojniku
$\vec{M}_{R/B} \:=\; \vec{r}_{A/B}\times \underbrace{\displaystyle\sum_{i=0}^{n-1} \vec{F}_i}_{\textstyle \vec{F}_R} \;+\, \underbrace{\,\displaystyle\sum_{i=0}^{n-1} \vec{r}_{F_i/A} \times \vec{F}_i \:+\, \displaystyle\sum_{j=0}^{m-1} \vec{M}_j\,}_{\textstyle \vec{M}_{R/A}}$.
- rezultirajuće djelovanje u odnosu na točku $A$:
|
|
|
|
Konačni je izraz za rezultirajući moment u odnosu na točku $B$:
$\vec{M}_{R/B} \:=\; \vec{r}_{A/B} \times \vec{F}_R \:+\: \vec{M}_{R/A}$.
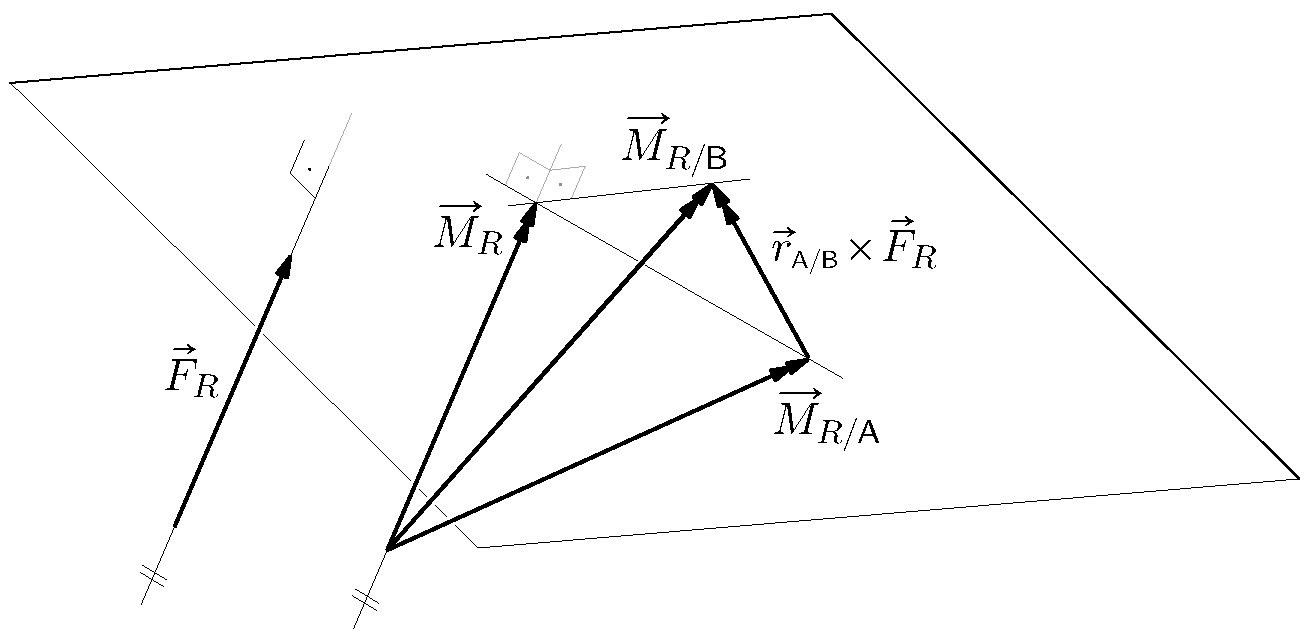
- statički ekvivalentno djelovanje u točki $B$ $\big(\vec{F}_R$, $\vec{r}_{A/B} \times \vec{F}_R$ i $\vec{M}_{R/A}\big)$:
|
|
|
|
- rezultirajuće djelovanje u odnosu na točku $B$ $\big(\vec{F}_R$ i $\vec{M}_{R/B}\big)$:
|
|
|
|
Rezultirajuće djelovanja u točki $B$ izračunat ćemo i neposredno (prema definiciji):
|
|
- rezultirajuća sila:
$\vec{F}_{R/B} \,=\, \vec{F}_R \,=\, \displaystyle\sum_{i=0}^{n-1} \vec{F}_i \,=\, \vec{F}_0 + \vec{F}_1$
(9/5, 13/5, 5/7) (9/5, 13/5, 5/7) |
- rezultirajući moment u odnosu na točku $B$:
$\vec{M}_{R/B} \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{M}_{F_i/B} \:+\, \displaystyle\sum_{j=0}^{m-1} \vec{M}_j \:=\: \vec{M}_{F_0/B} \,+\, \vec{M}_{F_1/B} \,+\, \vec{M}_0$
- položajni vektori sila u odnosu na točku $B$ ...
(13/20, -233/172, -5/6) (-3/5, -69/43, 7/8) (13/20, -233/172, -5/6) (-3/5, -69/43, 7/8) |
- ... i „pomak” momenta $\vec{M}_0$ u točku $B$:
|
|
- momenti sila u odnosu na točku $B$:
(0, -3/2, 2097/860) (-41191/12040, 3/7, -39/25) (0, -3/2, 2097/860) (-41191/12040, 3/7, -39/25) |
- rezultirajući moment:
(-56241/12040, 191/70, 2288/1075) (-56241/12040, 191/70, 2288/1075) |
- rezultirajuće djelovanje u odnosu na točku $B$:
|
|
- „grafička” konstrukcija rezultirajućega djelovanja:
- uvođenje momenata sila u odnosu na točku $B$ omogućava paralelni pomak sila u nju ...
|
|
- ... i „grafičke” konstrukcije rezultirajuće sile (paralelogram sila) i rezultirajućega momenta (paralelepiped momenata):
|
|
Iz zaključka još jednoga nastavka primjera 1. slijedi da je rezultirajuće djelovanje na sve točke pravca paralelnoga s pravcem djelovanja rezultirajuće sile jednako.
Invarijante sistema sila i koncentriranih momenata
Invarijanta je matematička ili fizička karakteristika nekog matematičkog pojma ili fizičke pojave, čija veličina ne ovisi o izboru koordinatnoga ili, općenitije, referentnog sustava u kojemu je određena.
Invarijante sistema sila i koncentriranih momenata veličine su koje ne ovise o izboru točke u odnosu na koju je izračunano njegovo rezultirajuće djelovanje.
Prva je invarijanta rezultirajuća sila sistema:
$\vec{F}_R \:=\: \displaystyle\sum_{i=0}^{n-1} \vec{F}_i \:=\: \vec{F}_{R/A} \:=\: \vec{F}_{R/B} \:=\: \ldots$
Neka je $\vec{M}_{R/T}$ rezultirajući moment sistema u odnosu na neku, bilo koju točku $T$. Druga je invarijanta ortogonalna projekcija $\vec{M}_R$ momenta $\vec{M}_{R/T}$ na bilo koju os $o$ paralelnu s pravcem djelovanja sile $\vec{F}_R$:
$\vec{M}_R \:=\: \big(\vec{M}_{R/T}\cdot\vec{e}_o\big)\,\vec{e}_o \:=\: \big(\vec{M}_{R/A}\cdot\vec{e}_o\big)\,\vec{e}_o \:=\: \big(\vec{M}_{R/B}\cdot\vec{e}_o\big)\,\vec{e}_o \:=\: \ldots, \qquad \vec{e}_o \,=\, \vec{e}_R \,=\, \dfrac{\vec{F}_R}{\big\|\vec{F}_R\big\|}$.
Dokaz invarijantnosti vektora $\vec{M}_R$ neposredno slijedi iz ranije izvedenoga izraza
$\vec{M}_{R/B} \:=\: \vec{r}_{A/B}\times\vec{F}_R \,+\, \vec{M}_{R/A}$
i činjenice da su vektori $\vec{r}_{A/B}\times\vec{F}_R$ i $\vec{F}_R$ međusobno okomiti (ako $\vec{r}_{A/B}\times\vec{F}_R \ne \vec{0}$): vektori $\vec{M}_{R/A}$ i $\vec{M}_{R/B}$ za bilo koje dvije točke $A$ i $B$ razlikuju se stoga za vektor koji je okomit na pravac djelovanja sile $\vec{F}_R$, pa njegova ortogonalna projekcija na os paralelnu s tim pravcem iščezava.
Lako je vidjeti da je $\vec{M}_{R}$ rezultirajući moment najmanjega intenziteta koji se može pojaviti.
Primjer 2. (još jedan nastavak):
Provjerit ćemo je li $\big(\vec{M}_{R/A}\cdot\vec{e}_R\big)\,\vec{e}_R \:=\: \big(\vec{M}_{R/B}\cdot\vec{e}_R\big)\,\vec{e}_R$.
(63/2575*sqrt(515), 91/2575*sqrt(515), 1/103*sqrt(515)) (63/2575*sqrt(515), 91/2575*sqrt(515), 1/103*sqrt(515)) |
(18207/515000, 26299/515000, 289/20600) (18207/515000, 26299/515000, 289/20600) |
(18207/515000, 26299/515000, 289/20600) (18207/515000, 26299/515000, 289/20600) |
True True |
U stvari, dovoljno je provjeriti jesu li vrijednosti projekcija jednake — je li $\vec{M}_{R/A}\cdot\vec{e}_R \:=\: \vec{M}_{R/B}\cdot\vec{e}_R$.
289/103000*sqrt(515) 289/103000*sqrt(515) 289/103000*sqrt(515) 289/103000*sqrt(515) |
True True |
Centralna os $\mathit\&$ dinamički vijak
Centralna os je pravac za sve točke $C_\xi$ kojega vrijedi da su pripadni rezultirajući momenti $\vec{M}_{R/C_\xi}$ paralelni s rezultirajućom silom $\vec{F}_R$. Centralna os postoji samo ako je $\vec{F}_R \ne \vec{0}$.
Centralna je os paralelna s pravcem djelovanja rezultirajuće sile $\vec{F}_R$ [dokažite!].
Neka je $\vec{M}_{R/T}$ rezultirajući moment sistema u odnosu na bilo koju točku $T$ i neka je $\vec{M}_R$ je ortogonalna projekcija momenta $\vec{M}_{R/T}$ na bilo koju os $o$ paralelnu s pravcem djelovanja sile $\vec{F}_R$,
$\vec{M}_R \:=\: \big(\vec{M}_{R/T}\cdot\vec{e}_R\big)\,\vec{e}_R.$
Dokažite da su svi $\vec{M}_{R/C_\xi}$ jednaki $\vec{M}_{R}$!
Ako se centralna os uzme za pravac djelovanja sile $\vec{F}_R$, rezultirajuće se djelovanje naziva dinamičkim vijkom.
Polje rezultirajućih djelovanja u točkama ravnine okomite na centralnu os:
|
|
|
|
Prostorno polje rezultirajućih momenata:
|
|
Opis općega linearnoalgebarskog postupka određivanja položaja centralne možete naći u udžbeniku Heinricha Wernera Mehanika I. Statika, a osnovne izraze i u datoteci Statička ekvivalencija. Ovdje ćemo prikazati tek dva jednostavnija primjera.
Primjer 3.:
Sila $\vec{F}_0 = \vec{\jmath}$ djeluje u ishodištu, a sila $\vec{F}_1 = \vec{\imath}$ u točki $A = (0, 0, 1)$. Odredit ćemo pripadni dinamički vijak.
|
|
|
|
- u ishodištu dodajemo sile $\vec{F}_1$ i $-\vec{F}_1$ ...
(5, 0, 0) (-5, 0, 0) (5, 0, 0) (-5, 0, 0) |
|
|
|
|
- ... rezultirajuća sila je $\vec{F}_R = \vec{F}_0 + \vec{F}_1$; sile $\vec{F}_0$ i $\vec{F}_1$, koje djeluju u ishodištu, možemo zamijeniti silom $\vec{F}_R$, također u ishodištu ...
(5, 5, 0) (5, 5, 0) |
|
|
- ... sile $\vec{F}_1$ u $A$ i $-\vec{F}_1$ u ishodištu tvore spreg koji zamjenjujemo momentom sprega $\vec{M}_1$ ...
(0, 0, 5) (0, 25, 0) (0, 0, 5) (0, 25, 0) |
|
|
- ... moment $\vec{M}_1$ rastavljemo u komponente $\vec{M}{}_1^{\,\|}$ i $\vec{M}{}_1^{\perp}$: $\vec{M}_1 = \vec{M}{}_1^{\,\|} + \vec{M}{}_1^{\perp}$; komponenta $\vec{M}{}_1^{\,\|}$ paralelna je s pravcem djelovanja sile $\vec{F}_R$, pa je možemo izračunati kao ortogonalnu projekciju na taj pravac (komponenta $\vec{M}{}_1^{\,\|}$ druga je invarijanta $\vec{M}_R$ sistema $\big\{ \vec{F}_0, \vec{F}_1 \big\}$) ...
|
|
|
|
- ... komponenta $\vec{M}{}_1^{\perp}$ okomita je na pravac djelovanja sile $\vec{F}_R$, a izračunati je možemo prema izrazu $\vec{M}{}_1^{\perp} = \vec{M}_1 - \vec{M}{}_1^{\,\|}$ ...
|
|
0 0 |
|
|
- ... moment $\vec{M}{}_1^{\perp}$ ćemo zamijeniti spregom sila $\vec{F}_R$ i $-\vec{F}_R$; sila $-\vec{F}_R$ djelovat će u ishodištu, a hvatište sile $\vec{F}_R$ (općenitije, pravac njezina djelovanja) odredit ćemo iz uvjeta da je moment sprega jednak momentu $\vec{M}{}_1^{\perp}$:
izraze
$\vec{r}_{X/O}\times\vec{F}_R = \vec{M}{}_1^{\perp}$ ili $\vec{r}_{X/O}\times\vec{F}_R - \vec{M}{}_1^{\perp} = \vec{0}$
možemo smatriti sustavom koji sadrži tri jednadžbe s tri nepoznanice — komponente vektora $\vec{r}_{X/O}$, odnosno, koordinate tražene točke ...
(x, y, z) (x, y, z) |
|
|
|
|
- ... budući da rješenje sadrži neodređeni koeficijent $r_I$, postoji $\infty^1$ rješenja — riječ je točkama na pravcu [kojemu?]; za hvatište sile $\vec{F}_R$ možemo uzeti bilo koju njegovu točku ...
|
|
(5, 5, 0) (-5, -5, 0) (5, 5, 0) (-5, -5, 0) |
True True |
|
|
- ... za sile $\vec{F}_R$ i $-\vec{F}_R$ koje djeluju u ishodištu je $\vec{F}_R + (-\vec{F}_R) = \vec{F}_R - \vec{F}_R = \vec{0}$, pa preostaju samo sila $\vec{F}_R$ u točki $B$ i moment $\vec{M}{}_1^{\,\|} = \vec{M}_R$ ...
|
|
(5, 5, 0) (5, 5, 0) |
|
|
(25/2, 25/2, 0) (25/2, 25/2, 0) |
|
|
- ... pravac djelovanja sile $\vec{F}_R$ je centralna os, a sila $\vec{F}_R$ i moment $\vec{M}_R$ čine dinamički vijak ...
|
|
Pogodno je uzeti da je uz rezultirajuću silu $\vec{F}_{R}$ na centralnoj osi i rezultirajući moment $\vec{M}_{R}$.
Primjer 4.:
Sila $\vec{F}_0 = \vec{\imath}$ djeluje u točki $A_0 = \big(\!\frac{5}{4}, 0, 0\big)$, $\vec{F}_1 = 2\,\vec{\jmath}$ u točki $A_1 = \big(0, \frac{9}{4}, 0\big)$, a sila $\vec{F}_2 = 2\,\vec{k}$ u točki $A_2 = \big(\!\frac{9}{8}, \frac{9}{4}, 0\big)$. Odredit ćemo njihov dinamički vijak. [Priču koja prati/opisuje slike ispričajte sami!]
|
|
|
|
|
|
(9/8, 9/4, 0) (9/8, 9/4, 0) |
(9/2, -9/4, 0) (9/2, -9/4, 0) |
|
|
(1, 2, 2) (1, 2, 2) |
(9/2, -9/4, 0) (9/2, -9/4, 0) |
|
|
(0, 0, 0) (0, 0, 0) |
(9/2, -9/4, 0) (9/2, -9/4, 0) |
|
|
|
|
|
|
{r2}
r2
{r2}
r2
|
|
|
|
|
|
|
|
|
|
|
Rezultanta
Ako rezultirajući moment dinamičkoga vijka iščezava, rezultirajuća se sila naziva rezultantom. Rezultanta je, dakle, sila koja je sama statički ekvivalentna zadanom sistemu sila i koncentriranih momenata.
Pravac djelovanja rezultante je centralna os.
U primjeru 4. je $\vec{M}_{R} = \vec{M}{}^{\|}_{R/O} = \vec{0}$. Slijedi da je $\vec{M}_{R/O} = \vec{M}{}^\perp_{R/O}$, a to znači da je $\vec{M}_{R/O} \,\perp\, \vec{F}_R$.
True True |
Rezultanta, prema tome, postoji ako je $\vec{M}_{R/T} \perp \vec{F}_R$ za neku točku $T$ izvan centralne osi.
Polje rezultirajućih djelovanja u točkama ravnine okomite na centralnu os ako je $\vec{M}_{R} = \vec{0}$:
|
|
Primjer 4. (nastavak):
Drugi način određivanja rezultante — bez uvođenja rezultirajućega momenta. [I sada opis slika možete ispričati sami.]
|
|
|
|
|
|
|
|
|
|
(1, 2, 2) (1, 2, 2) |
|
|
|
|
|
|